Actions horizontales sur une poutre de roulement – Marche en Crabe d’un pont roulant
Les actions de ponts roulants doivent être spécifiées par les fournisseurs d’appareils de levage. Pour autant, la norme NF EN 1991-3 : 2007 propose une approche de calcul pour permettre aux concepteurs de poutres de roulement d’évaluer ces actions et de contrôler les données qui leur sont transmises.
Cet article reprend la démarche exposée dans l’Eurocode pour calculer les composantes horizontales des forces dues à la marche en crabe, dans le cas particulier des ponts IFF à 4 galets.
Répartition des actions
Lors du déplacement d’un pont roulant, celui-ci subit des perturbations qui peuvent le faire dévier de sa trajectoire. Le pont tend alors à tourner autour de sa position tout en continuant sa progression le long de la voie de roulement. Le pont se déplace de biais, d’où le terme de « Marche en crabe ».
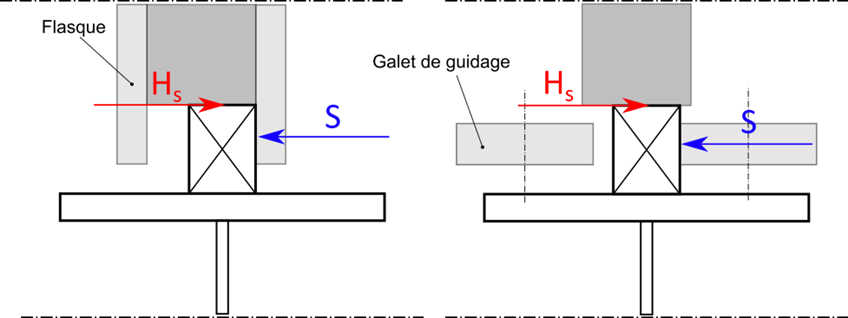
Afin de limiter ce comportement, les ponts modernes sont équipés de systèmes de guidage dont la fonction est d’empêcher le pont de dévier exagérément de sa trajectoire. Il peut s’agir de flasques installées sur les galets extrêmes ou de galets horizontaux situés à l’avant du pont. Lorsque le pont se met en crabe, une force de guidage se développe au niveau du point de contact entre le dispositif de guidage et le rail. Cette force permet de contenir la rotation du pont dans le plan.
En réaction à cette force de guidage, un champ de forces horizontales de frottement apparaît au niveau de l’interface rails/ galet. La résultante de ces forces horizontales est égale et opposée à la force de guidage.
Force de guidage et réaction de marche en crabe pour deux dispositifs de guidage différents : flasque à gauche et galets de guidage à droite.
Force de guidage et réaction de marche en crabe pour deux dispositifs de guidage différents : flasque à gauche et galets de guidage à droite.
La distribution et le sens des forces horizontales exercées sur les rails dépendent de la position du pôle instantané de rotation autour duquel tourne le pont, et du type de pont.
Dans le cas spécifique d’un pont IFF (Indépendants Fixe/Fixe, voir référence [2]) équipé de 2 paires de galets fixes et indépendants, avec un système de guidage situé au niveau des galets, seuls les premiers galets sont soumis aux forces horizontales provenant de la marche en crabe.
Actions horizontales générées par la marche en crabe d’un pont roulant, si le système de guidage est intégré aux galets
La distribution des réactions de marche en crabe dépend des positions du chariot et de la force de guidage. Les 4 configurations possibles sont présentées en figure 1. Il est à noter que l’intensité de la réaction est toujours plus importante du côté où se trouve le chariot. Les configurations 1 et 3 donnent les résultantes d’action les plus défavorables pour la voie de roulement.
Actions sur les voies
Les expressions suivantes proviennent de la norme NF EN 1991-3 [2]. Elles sont applicables dans le cas d’un pont IFF à 4 galets, avec un dispositif de guidage positionné au niveau des galets.
Il est sécuritaire de prendre comme valeur simplifiée de l’effort de guidage, S :
ΣQr : Somme des efforts verticaux, comprenant le poids du pont, du chariot et de la masse à lever.
Les forces horizontales exercées par les galets sur la voie ont pour expressions :
Avec :
L’excentrement lS est la distance qui sépare le centre d’inertie de l’axe médian du pont. Le calcul de lS est présenté dans la fiche intitulée : Accélération et décélération [1]. La réaction HS,i,1,T est toujours plus importante du côté où est positionné le chariot.
[2] NF EN 1991-3, Eurocode 1 – Actions sur les structures– Partie 3 : Actions induites par les appareils de levage et les machines – Indice de classement P 06-130.
[3] NF EN 1991-3/NA, Eurocode 1 – Actions sur les structures – Partie 3 : Actions induites par les appareils de levage et les machines. Annexe Nationale à la NF EN 1991-3:2007. AFNOR. Janvier 2010.
[4] NF EN 13001-2, Sécurité des appareils de levage à charge suspendue – Conception générale – Partie 2 : Charges. AFNOR. Mars 2021.